
近日,喷水 数学与系统科学学院研究生赵子涵,在庄光明教授的指导下以第一作者身份在国际权威期刊《IEEE Internet of Things Journal》发表题为《Observer-based sliding mode control with adaptive event-triggered mechanism of networked discrete singular systems against FDI attacks》的研究成果,通讯作者为庄光明教授,喷水 为第一署名单位。这标志着喷水 庄光明教授课题组在信息物理系统安全控制领域取得新的进展。
实际网络化离散奇异系统运行中,有限通信带宽、隐秘增量型虚假数据注入攻击以及部分状态无法直接测量等因素相互耦合,极易劣化系统动态性能、引发闭环失稳,围绕受网络攻击的离散奇异系统开展自适应事件触发滑模安全控制研究具备重要理论意义与工程实用价值。自适应事件触发能够按需筛选传输数据以节约信道资源,滑模控制凭借固有鲁棒性能有效抵御外部恶意扰动,观测器技术可实现不可测状态在线重构,三类技术的融合为解决攻击干扰下的系统管控难题提供可行思路。受隐秘渐进式注入攻击、网络资源紧缺、状态测量受限等现实条件制约,如何协同设计自适应传输机制、状态观测方案与滑模控制规则,在节约带宽开销的同时抑制虚假数据攻击、保障系统正则因果与稳定,仍是目前亟需突破的研究难点。为协同应对信道冗余传输与隐秘虚假数据注入带来的双重难题,提出融合中值滤波的自适应事件触发观测滑模协同控制方案。依托采样输出与历史发送数据均值构建动态触发条件,利用反正切函数实时调整触发阈值,摆脱固定阈值触发带来的资源浪费;搭配状态观测器实现系统未知状态在线重构,依托滑模自身抗扰能力削弱增量式攻击造成的系统偏差。
同时设计滑模观测器完成系统未知状态重构,补齐状态信息缺失短板;依托采样均值思想搭建自适应触发机制,构造含状态信息的新型离散滑模面并配套设计滑模控制律,实现系统状态与观测误差有限时间收敛至滑模面。该方案把中值滤波型自适应触发机制和抗扰滑模控制有机结合,既能削减网络冗余传输、又可抵御增量型虚假数据注入攻击。借助李雅普诺夫稳定性理论与线性矩阵不等式推导系统稳定判定条件,从理论层面保障闭环系统满足正则、因果、有界的基本属性,显著提升系统在网络受限与恶意攻击并存环境下的鲁棒稳定性。
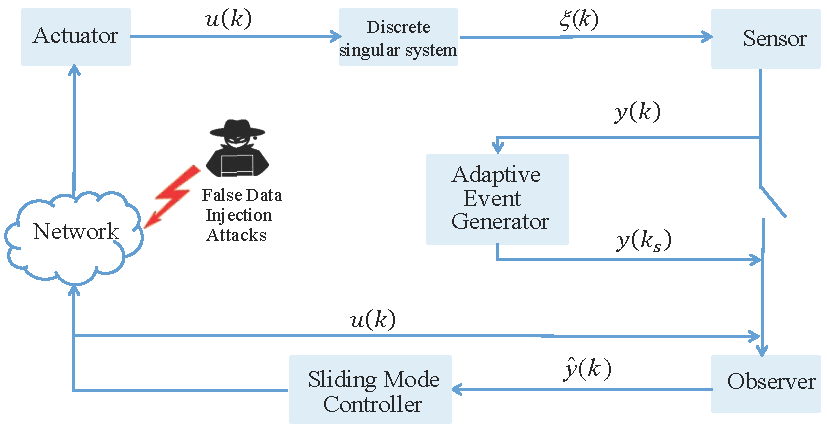
图1 虚假数据注入攻击下网络化离散奇异系统框架图
当网络化离散奇异系统面临信道资源受限、隐秘虚假数据注入攻击、部分状态难以测量等多重因素耦合干扰时,同步统筹事件触发机制、状态观测方案与抗扰控制的一体化设计难度较大,如何在实现不可测状态精准重构的基础上优化网络传输效率、抑制恶意注入扰动,仍是现阶段的研究难点。各类干扰因素的叠加不仅提升控制器设计难度,也加大了奇异系统正则性、因果性的理论分析复杂度。除此之外,如何依托滤波优化触发逻辑,在无需预先限定攻击幅值的条件下完成扰动补偿,妥善处理奇异矩阵带来的推导障碍,同样有待深入探索。
为实现不可测状态精准还原、削减网络无效传输并抑制增量型虚假数据注入带来的不利影响,保障网络化离散奇异系统稳定运行,本文融合中值滤波自适应触发与滑模控制理论,构建集数据调度、状态观测、扰动抑制于一体的综合控制方案。借助新型自适应事件触发规则优化信道占用,依靠滑模观测器完成系统隐状态重构,基于含时序信息的滑模曲面设计控制策略以抵消隐秘攻击扰动。依托李雅普诺夫稳定性理论与线性矩阵不等式推导闭环系统正则、因果且有界的约束条件,选取直流电机、隧道二极管电路两类典型工程模型开展仿真试验,充分验证所提控制策略的可行性与优越性。
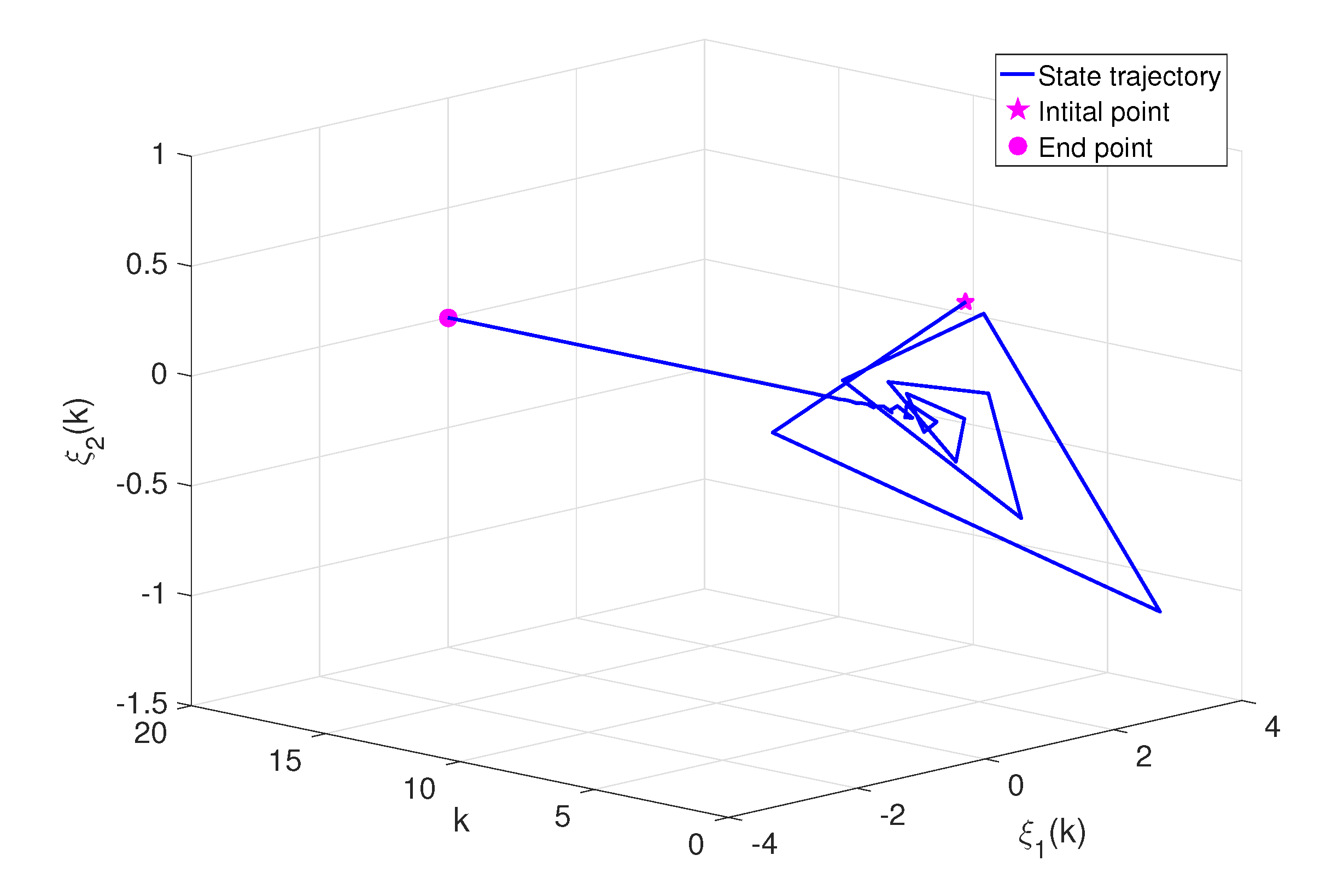
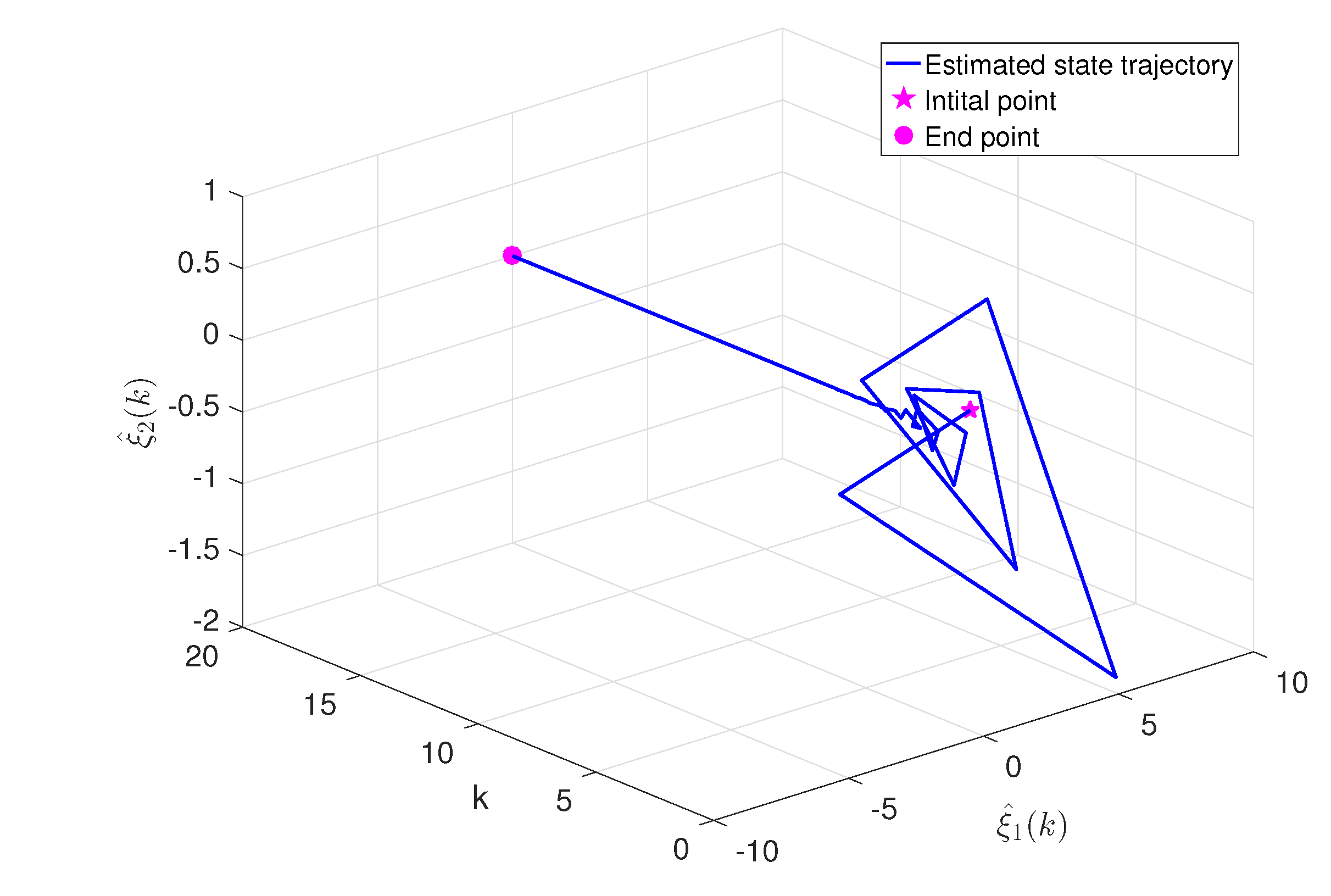
(a) (b)
图2 虚假数据注入攻击下直流电机系统的三维状态轨迹、状态估计轨迹:(a) 真实状态的轨迹图;(b) 估计状态的轨迹图;
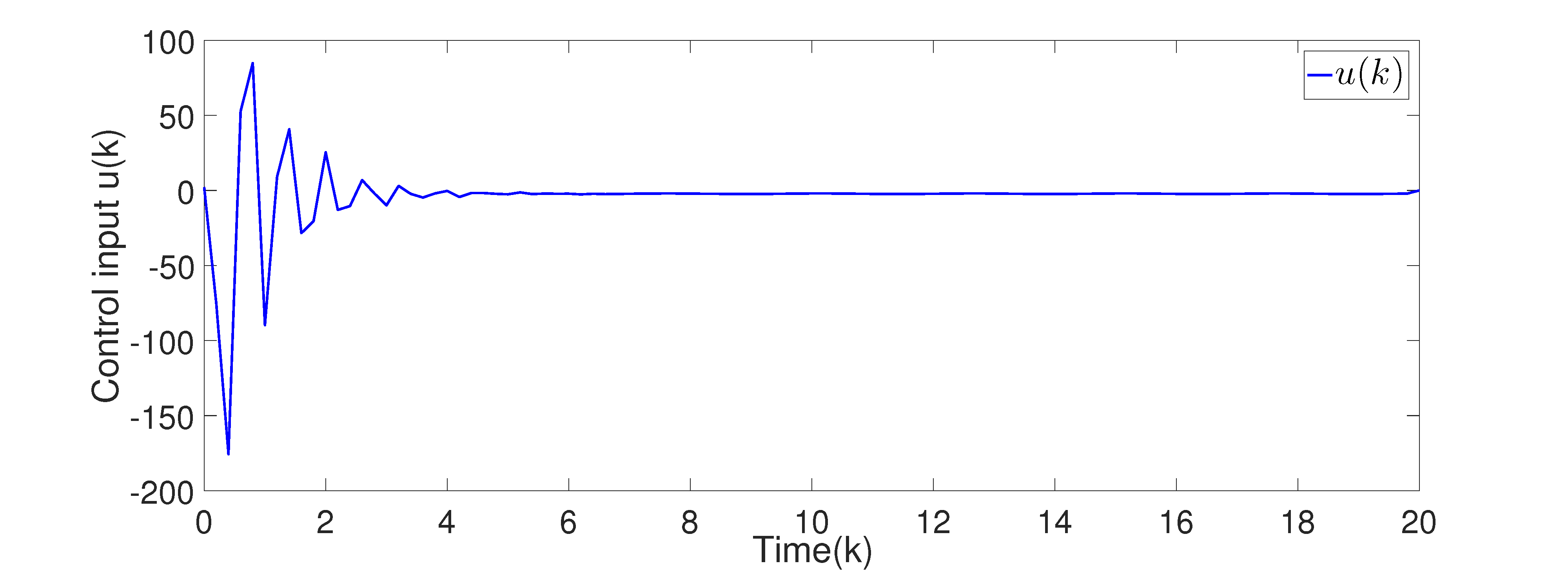
(a) (b)
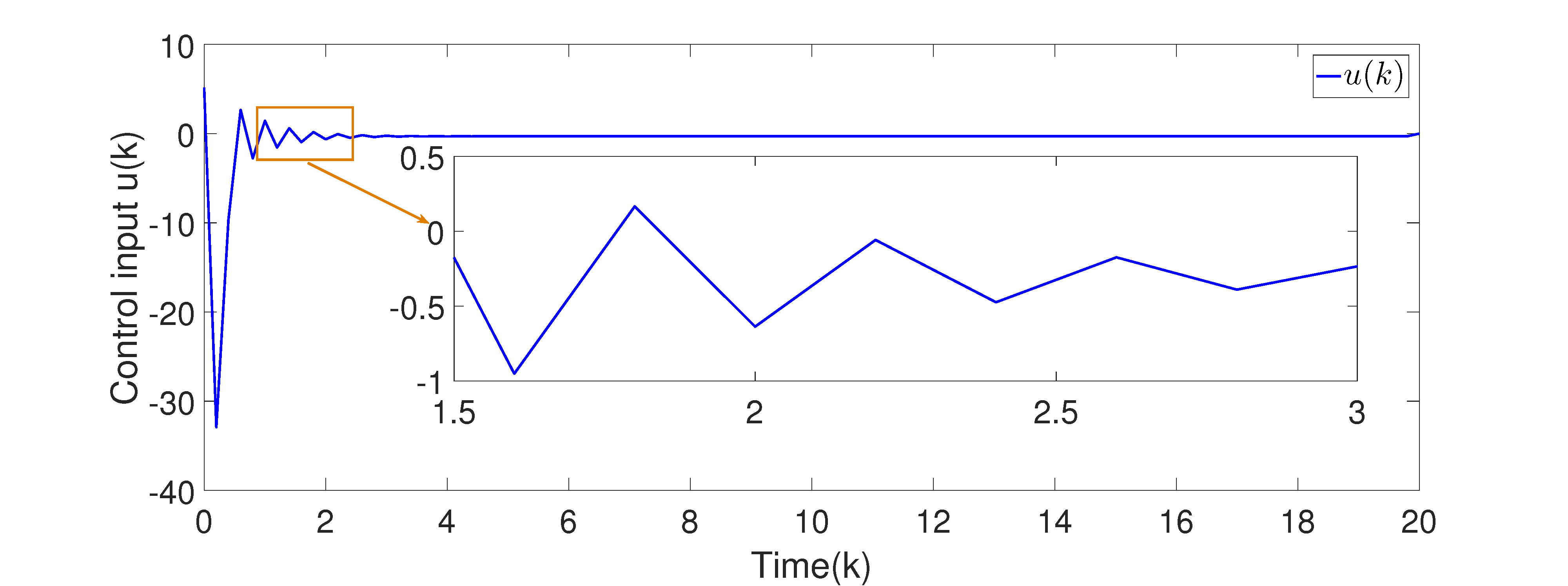
图3 滑模控制器下不同系统控制输入图像:(a) 直流电机系统控制输入图像;(b) 隧道二极管电路系统控制输入图像